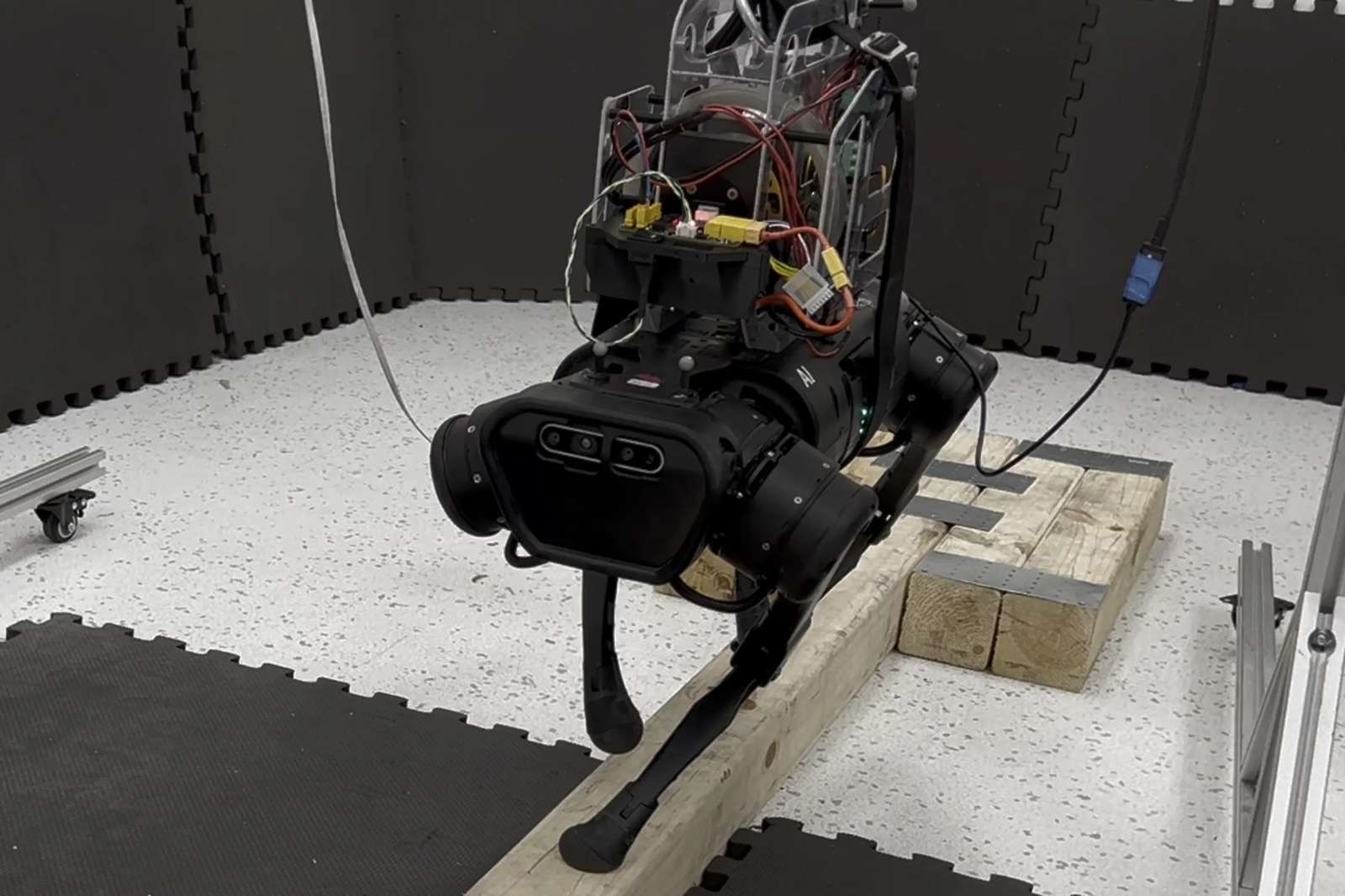
Marcher en équilibre sur une poutre ou un sentier étroit est difficile pour les humains et était pratiquement impossible pour les robots à quatre pattes. Pour résoudre ce problème d’équilibre, les chercheurs de l’Institut de robotique de l’Université Carnegie Mellon ont apporté des modifications à un robot Unitree A1. Afin d’assurer ces évolutions périlleuses, ils ont ajouté deux dispositifs provenant de la technologie utilisée par les satellites pour ajuster leur position. Il s’agit de la « roue de réaction », également appelée RWA. Lorsqu’il tourne dans un sens, ce volant d’inertie lourd fait tourner le satellite dans l’autre sens. C’est le même système qui est utilisé sur le robot pour contrôler son équilibre.
Un RWA gère l’axe de tangage du robot, tandis que l’autre contrôle son axe de roulis. L’ensemble mécanique pèse 4,3 kilogrammes et est situé sur le dos du robot. Lors des essais, ce dernier a pu se déplacer sur une poutre de trois mètres de long et large de six centimètres.